驱动器是把计算机控制系统提供的弱电信号放大为步进电机能够接受的强电流信号,控制系统提供给驱动器的信号主要有以下三路:
1.步进脉冲信号CP:这是最重要的一路信号,因为步进电机驱动器的原理就是要把控制系统发出的脉冲信号转化为步进电机的角位移,或者说:驱动器每接受一个脉冲信号CP,就驱动步进电机旋转一步距角, CP的频率和步进电机的转速成正比, CP的脉冲个数决定了步进电机旋转的角度。这样,控制系统通过脉冲信号CP就可以达到电机调速和定位的目的。
2.方向电平信号DIR:此信号决定电机的旋转方向。比如说,此信号为高电平时电机为顺时针旋转,此信号为低电平时电机则为反方向逆时针旋转。此种换向方式,我们称之为单脉冲方式。另外,还有一种双脉冲换向方式:驱动器接受两路脉冲信号(标注为CW和CCW),当其中一路(如CW)有脉冲信号时,电机正向运行,当另一路(如CCW)有脉冲信号时,电机反向运行。用户使用何种方式,由拨位开关设定。
3. 使能信号EN:此信号在不连接时默认为有效状态,这时驱动器正常工作。当此信号回路导通时,驱动器停止工作,这时电机处于无力矩状态(等同于本公司SH系列驱动器的FREE信号),此信号为选用信号。
为了使控制系统和驱动器能够正常的通信,避免相互干扰,我们在驱动器内部采用光耦器件对输入信号进行隔离,三路信号的内部接口电路相同,常用的连接方式为①共阳方式:把CP+、DIR+和EN+接在一起作为共阳端接外部系统的+5V,脉冲信号接入CP-端,方向信号接入DIR-端,使能信号接入EN-端;②共阴方式:把CP-、DIR-和EN-接在一起作为共阴端接外部系统的GND,脉冲信号接入CP+端,方向信号接入DIR+端,使能信号接入EN+端;③差动方式:直接连接。
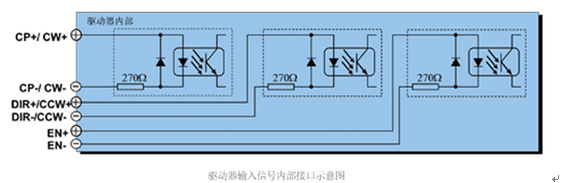
驱动器输入信号内部接口示意图
如果驱动器输入信号为电压信号,要求:3.6V≤高电平≤5.5V; -5.5V≤低电平≤0.3V,最常用的为TTL电平。
如果驱动器输入信号为电流信号,要求:7mA≤高电流≤18mA; -18mA≤低电流≤0.2mA。
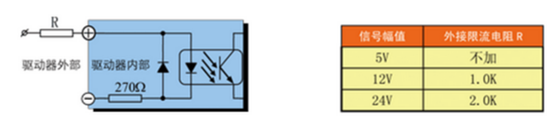
不管是电压信号还是电流信号,最终转化为光耦器件的输入电流以达到信号传输的目的(参考上图),如果电压信号的幅值超出以上要求的范围须在外部另加限流电阻R,保证给驱动器内部光耦提供7-18mA的驱动电流,参见下图和下表。
步进电机的运行是由脉冲信号控制的,步进电机在脉冲信号的有效沿到来的时刻移动一个步距角,本系列驱动器的有效沿是指:脉冲信号电流“由小到大”的时刻,或者说脉冲电平“由低到高”的时刻,或者说是驱动器内部光耦“由截止到打开”的时刻。
脉冲信号的频率要求不大于200KHz;
脉冲信号的宽度要求不小于2μS。
脉冲信号的驱动电流要求为7-18mA
电机换向时,一定要在电机降速停止后再换向。换向信号要求在前一个方向的最后一个脉冲有效沿结束至少5μS以上才能改变换向信号,且不滞后下一个脉冲信号的有效沿。
如果使用双脉冲CW/CCW方式,则要求下一个方向的第一个脉冲(如CCW)在前一个方向的最后一个脉冲(CW)有效沿后至少5μs才能有效。